heterogenous offline rl
Paper Collection(Multiple Policies Optimization in Offline RL)
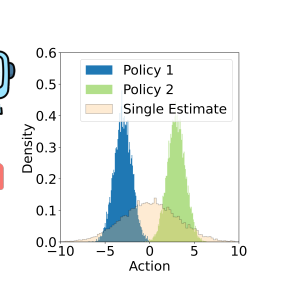
多策略集构成的数据集可能让基于策略约束的offline rl算法出现退化,总结一下基于mixture policies做offline rl的方法
reference
- offline rl from heteroskedastic data 提出了一个toy model
- Real World Offline Reinforcement Learning with Realistic Data Source
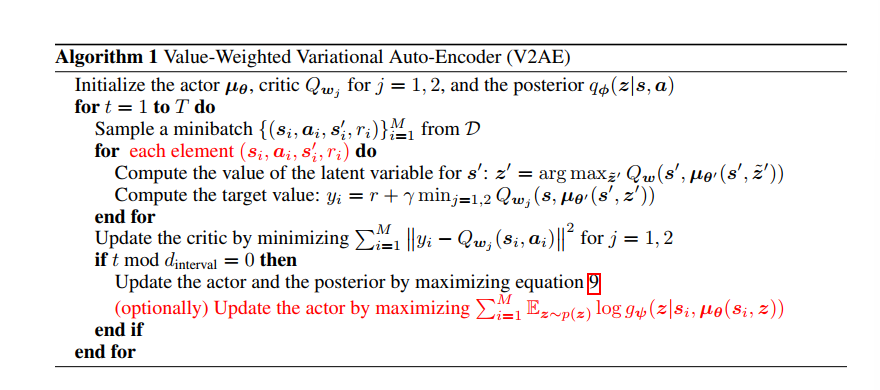
- V2AE,policy structure
Importance of Policy Structure of Offline RL
本文通过控制latent variable,得到了一个state-action space下的diverse policies,本文提出的基于diverse policy学习的算法可以减少offline rl中的critic loss
定义Mixture policy
一个policy有latent variable z控制
选择latent variable的gating policy根据Q值最大的latent variable得到
目标函数被定义为policy evaluation函数在动作-状态空间上的期望
Maximizing Variational Lower Bound to train an actor
希望获得$\ref{objfunc}$的lower bound,写出它在latent variable z下的变分下界,假设
- policy evaulation function参数w,记作$\hat {f^\pi_w}(s,a) $
- deterministic policy function参数$\theta$,记作$\pi_\theta(a|s)$
- behavior policy记作$\beta(a|s)$
推导$J(\pi)$的对数下界为
参数策略$\pi_\theta(a|s)$的变分下界写成
RHS本质上是一个cvae的loss函数,policy conditional variable是latent variable,先验分布并非一个无参数的分布,而是Q值的softmax
Q值根据double-clip计算得到,$\ref{loss policy}$第一项是离散分布的KL散度,第二项是predictive loss,这样得到$\ref{loss return}$的lower bound表示
用于训练CVAE,优化这个损失函数可以优化cvae,
Train the critic for a mixture of deterministic policies
带有gating policies的Bellman Equation写成
Algorithm
- 为什么通过优化$\ref{CVAE}$可以学习到好的actor?
因为CVAE计算KL散度中需要计算encoder产生的离散分布,离散分布和Q值和actor计算的动作有关
- 为什么是max CVAE的损失函数
本质上$\ref{CVAE}$并非CVAE真正的损失函数,第一项
描述的是分布距离,KL散度的意义告诉我们希望尽量减少KL散度,也就是max它的相反数,第二项
完全可以用重构距离描述
如何在离散分布采样中反向传播(无需,直接求解期望即可)
对于状态$s_i$,计算它在k组latent variable下的动作,记作
计算loss采取加权
Code Implementation
构造CVAE
Actor-Critic
采样实现反向传播,从先验分布$p(z)$中采样z,计算$A_\theta(s,z)$,希望最小化重构距离,loss表示为
Experiment
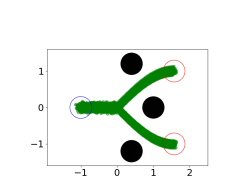
toy环境(稀疏奖励)
D4RL Benchmark
Behavior Estimation from Multi-Source Data for Offline Reinforcement Learning
Multi-Source Trajectory带来的问题是在同一个状态倾向于采取不同的动作,本文通过从异质数据集中建模多个策略解决数据异构型的问题。本文提出的基于latent variable的model-learning算法将policy和trajectory嵌入到低维空间中,并尝试从低维空间表示中重建action
Task:Behavior Estimation
给定数据集$D=\{\tau_m\}$,输出生成数据集的behavior policy
medium-replay data来自多个策略
Problem Statement(Behavior Estimation from Multi-source Data)
对于包含M条trajectory的数据集$D= \{\tau_m\}_{m=1}^M$,可以认为它采样自不同策略,希望输出一个K个策略组成的behavior set $\mathcal B=\{b_k \}_{k=1}^K$。同时生成轨迹到策略的映射矩阵
$G_{u,v} = 1\Rightarrow$轨迹$\tau_u$由策略$b_v$生成
From persepective of Possibility Graph
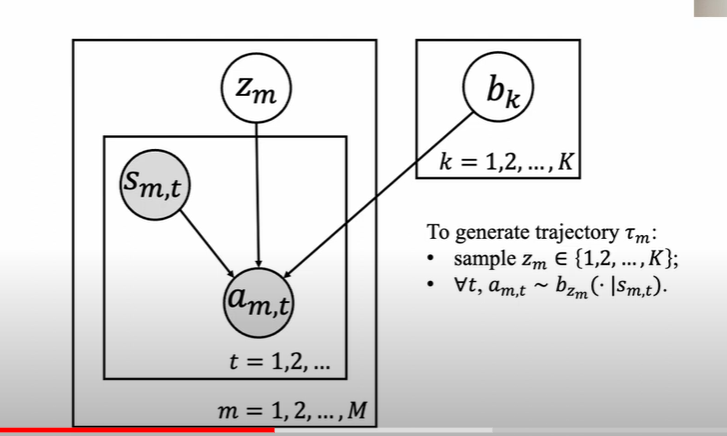
Latent-Variable Model
假设数据集来自K个策略,生成策略的过程可以分成两个部分
- 选择对应的latent variable $z_m$
- 基于策略$b_{z_m}$采样生成轨迹
这里一条基本假设是每条轨迹均来自单一策略
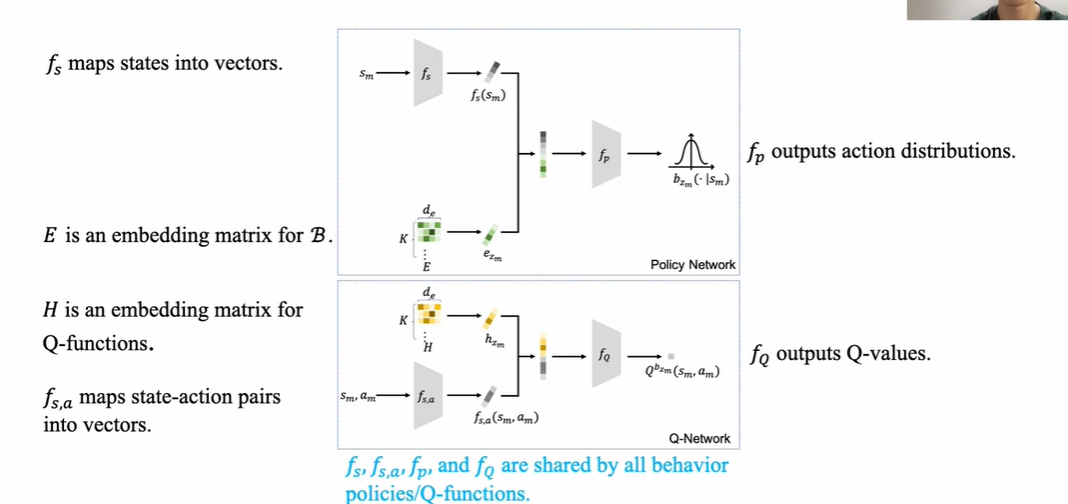
Policy Network和Q-Network包括三个矩阵
- $W\in \R^{M\times d_e}$,将$\mathcal D$中的每个trajectory映射到一个长度$d_e$的嵌入
- $E\in \R^{K\times d_e}$是每个policy的嵌入
- $H\in \R^{K\times d_e}$是每个策略的Q function的嵌入矩阵
- 构建policy network:$f_s$将state嵌入到low-representation,和E矩阵中对应的张量concat送入policy encoder $f_p$中输出policy的分布
- 构建Q network:将state-action pair嵌入到low-representation $f_{s,a}$,和policy embedding做concat送入$f_Q$
真实异质数据集
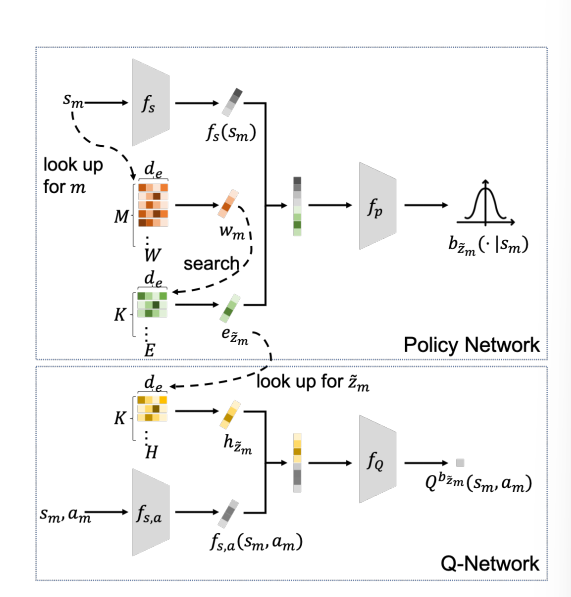
Parameter Updated
$z_m$作为当前state $s_m$选择的策略下标,它的先验分布根据$e_j,w_m$内积计算得到
通过action reconstruction学习trajectory embedding matrix $W\in \R^{M\times d_e}$,希望通过$f_s,w_m,e_{z_m}$重建$a_m$,因此损失函数为
$e_{z_m},w_n$都是$d_e$维向量,可以作为actor输入,W矩阵用于获取policy矩阵中policy嵌入
同时根据$\ref{prior}$,选择的$e_j$应该在内积上和$w_m$尽量相似,因此第二个损失函数写成
第三项损失函数是TD error,对于输入的transition $(s_m,a_m,r_m)$,通过policy net计算出一个动作分布,记作
从这个分布中采样计算TD error
总的loss记作
BRAC-v
BRAC-v是最简单的一类policy penality算法,基于learned policy和behavior policy之间的差异进行约束,它的Actor-Critic Loss记作
这个损失函数实际上在DDPG基础上加上策略距离
策略距离$D(\pi,b,s)$定义为
- $\pi$ learned policy
- b behavior policy
multi-source data条件下用$\ref{pdistance}$很难刻画策略距离,针对multi-source data的假设,我们在从一个轨迹$\tau_m$中学习时,希望使用对应轨迹的概率分布刻画它和Learned Policy之间的距离
参考本文中学习$f_s,f_p,s_{s,a}$的思路,希望学习两个representation
前者是learned policy representation,后者是对应的Q function representation
Experiment
数据集
基于3个D4RL环境,每个环境收集四个数据集
- random(random policy)
- medium(medium RL agent)
- medium-replay(训练Agent过程中收集的数据)
- medium-expert(medium+expert收集经验)
Heterogeneous-k dataset
基于SAC保存若干checkpoints收集的数据集